首先,还是对软尾的认识误区做个解释,通常说的软尾指的是带有后避震的车架,严格的说应该叫全避震车(软尾另有其物);后避震和避震前叉一样,不光是用来舒服的,更重要的是提高轮胎与地面的贴合,提高车子在颠簸路面的可控性。慢速地下压感觉棉柔的车子不见得是辆好的全避震车,可能高速颠簸时避震根本就反应不过来,道理同前叉;全避震车分很多类别,从XC到Trail,到AM(enduro),到FR到DH,对于分类,全避震车的分类界限比硬架分明的多,什么车基本上就只能做什么用,不像硬架,在能承受的范围内,凭本事可以乱来,当然车架都有极限,使用还是要在范围内,以免危险。
进入正题,下面是分类说明。全避震分为很多种结构:
1.单转点系统:
a、单连杆:
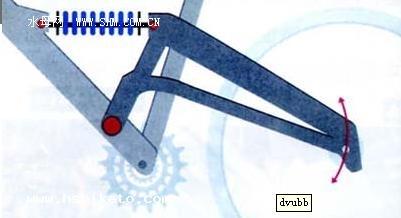
单连杆系统较为简单,反应直接。这种系统的联杆只借助一个轴承与车架的连结,也就是主转点,它的位置决定了车款的避震性能或者说是骑行风格。AM以下的车子一般转点在中盘左右高度,FR和DH以下坡为主的车子转点位置靠前而且偏高。
优点:结构简单,重量轻、造价便宜且易保养,避震反应直接灵敏。
缺点:侧向刚性不好,转弯易推头,没有踩踏平台,全依赖后避震器的踩踏功能
特点:单连杆系统大部分采用的是折衷的作法,因此必须使用具踩踏平台的后避震器。 代表车款:SANTA CRUZ 的super light


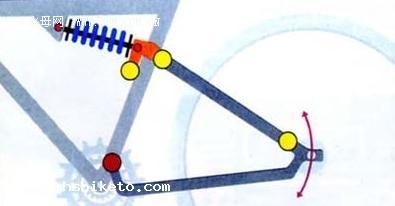
b. 单转点多连杆结构:
分为几种,如YETI ASR结构,代表车种:YETI 575、Merida 96至尊
在单转点的基础之上,在后避震器的尾端转点处加装一根“狗骨头”与车架相连,借以提高侧向刚性,这是目前增强单转点车架的通行做法,效果很好,优点同单连杆,缺点是踩踏效率仍然不怎么样,YETI575使用RP23后胆,即使踩踏全开也不能做到完全杜绝bobbing。但这个结构有个瓶颈,由于后叉没有转点,但减震工作时上下后叉的夹角是要改变的,所以YETI采用了碳纤后上叉,用后上叉的变形来补偿这个角度变化




另外一类是类似四连杆的外形
在上后叉的末端(尾钩上方)有一个转点,这种结构一般常见于几千元的低端全避震车,如UCC、凯路士等神货。说真的我也只试过ucc,如果不能说脏话,那我没什么好说的。
NRS:单转点多连杆的一个分支,代表车种:GIANT NRS 、Look920
后叉上没有转点,这是一个只顾踩踏而不顾避震性能的结构,不需要后避震有踩踏平台,因为它本来就不怎么动作,这种车子骑起来几乎和硬架无异,它的过时个人认为是有必要的。Look现在还在用这个结构,虽然它不叫NRS,但实质和NRS就没什么区别,不论是外观还是骑感。

APP结构:
代表车种:Santa Cruz Butcher
这是Santa Cruz在2011年推出的基于单转点的新结构,通过增加连杆来改变后轮轨迹,降低链条的干扰,车架杠杆比曲线与Vpp接近,但比Vpp柔和很多,速度也慢些,能带来行程深不见底的感觉。缺点:踩踏效率一般,和单转点差不多



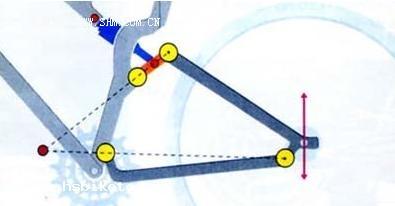
优点:作动极灵活,与传动变速系统的互相干扰很小。
缺点:有多个轴承(8~10个),略嫌过重。
特性:接近单转点的灵敏性和柔顺度,但刚性加强了,也减少了链条影响,刹车的干扰度较低
代表车款:Specialized FSR、FUJI Reveal

虚拟式转点(VPP)系统主结构: 虚拟式转点系统是由两支回转杆带动整个后轮,利用其缓冲行程做一个S型转弯运动。
如此一来,避震器在踩踏时即会自动定位于与传动系统不产生干扰的位置。并且,Vpp结构反应直接,后避震支撑感很好。
优点:踩踏效率较高,刚性好,避震后段有极佳的支撑。
缺点:需要细心调校,加工难度大,价格过高。
特性:不依赖具踩踏平台的后避震器,可以在舒适与踩踏间找到一个比较折中的平衡点。
代表车款:Santa Cruz Blur、Intense 951



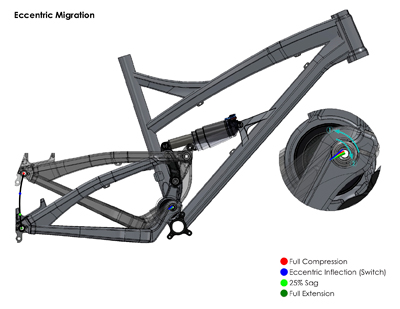
Switch Suspension 结构
这是YETI在去年的最新成果,而其代表车款SB-66当今也是炙手可热。该结构采用一个可移动位置的主转点,能带来前100mm行程的柔顺,以及后50mm的有力支撑。从后三角的运行原理说,这个结构其实和VPP没有实质区别,只是把Vpp连杆换成了转轴的。

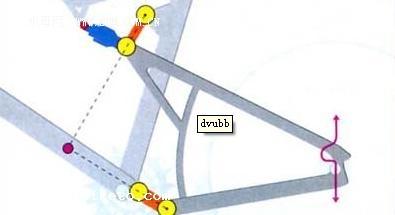
浮动式连结系统ABP主结构:
代表车种:TREK、KONA
这个比较饶口,在全避震车领域也是一个大胆尝试。
浮动式连结系统尽管看起来极为复杂,但基本上却是一个不折不扣的单转点多连杆系统。其特殊之处在于避震器悬置于回转杆和连杆之间,位置不是固定的,此种设计可使连杆拥有细腻的敏锐度及较低的重心。
优点:敏锐度高,重心较低,受刹车影响小,大动作吸震效果好。
缺点:需要复杂的车架结构设计,链条与避震的互相干扰极大,甚至影响了变速。还有就是由于连杆动作时后避震的动作很小,因此中小动作时避震效果并不好。

Mastro
Giant在NRS专利到期后,又买下了Mastro,这是个不错的系统,但有抄袭之嫌,是个DW-link的翻版。
优点:依赖着后避震器,踩踏不错,受链条干扰也少,避震曲线柔和,便宜
缺点:避震支撑力不足,不适合大强度动作,整体刚性不佳,受刹车影响较大。还有个人认为样子难看

I-Drive
GT的独创结构,GT坚持把五通独立于车架,即用一个连杆抵消后叉动作对五通的影响,保持了车架类似单转点的避震效果,同时又有较高的踩踏效率。
优点:避震效果柔顺,受链条干扰小,车架强度好
缺点:受刹车干扰较大

DW-LINK
号称最完美的软尾结构,踩踏好,据说还不受链条干扰,也不受刹车干扰,我没骑过,不好说。
代表车种:IBIS 、PIVOT


 软尾车架核心减震技术之DW-LINK系统发展史
软尾车架核心减震技术之DW-LINK系统发展史 Dave Weagle是DW-LINK的设计者,自从1990开始,Dave Weagle对广受欢迎的专业赛车和车手的日常表现特征做了详细的数据比对和统计,以用来不断改善DW-LINK的悬挂性能。而与骑手舒适至关重要的因素(加速效率,爬升和弯道牵引力,凹凸崎岖的吸收,踏板的反应,制动影响,车架强度和刚度,车架结构和车架制造的复杂性)都是开发悬挂系统过程中必须加以考虑的重要的因素。DW-Link 结合所有这些性能因素,产生一个完美平衡的系统。
配备了DW-LINK系统的品牌
Ibis、Independent Fab、 Iron Horse、 Pivot、Turner、BMC、anthem、Trek等。
DW LINK系统的优越性:
以同步工程技术设计的反泄力系统和后轮的功率曲线都可以显示DW LINK 系统的协调性和效率。
根据牛顿第三定律:
两个物体间的作用力和反作用力总是大小相等,方向相反,并且作用在同一直线上。简单来说自行车加速时的反作用力是它自身的重量,并且在运动过程中,将重量转移全部转移到后面。DW-Link系统能改变反作用力方向,提高效率和抓地力,并消除踩踏产生的回应力。
均衡的制动力
从DW-Link系统投射出它的立时支点在最佳位置。在巨大刹车力时,他实现后轮的平衡和稳定的路面循迹力。
结构优势
DW-Link结构使用更短更坚硬的连杆,因此可使用更轻量的碳纤维来制造,设计者可以通过结构及材料的优势提高三角结构的强度和减重。这种结构的优势让DW-Link系统更有效的发力,更有效地在颠簸的山路上走在理想的路线而不偏离方向 。
最佳的路面牵引(循迹)力
当你的避震器向障碍作出反应,DW-Link系统以后花鼓为中心做运动轨迹,智能的发生变化改变运动轨迹的重心以求稳定的吸收路面的凹凸。在行程处段,避震行程可以吸收地面小凹凸并保持牵引力。在行程中段,DW-Link后轴路径与前叉配合提供卓越的过弯循迹力和弹跳能力。后段行程增加压缩阻尼防触底,提供强大的大落差降落吸收。在不同的行程阶段,后轮根据落差大小,吸收震动轨迹的重心是发生变化的,从而更稳定的提供循迹力。
最低的踩踏反馈力
自行车踩踏反馈力的感觉体现于后下叉突然的长度变化对骑行中齿比变化的影响,直接的影响是变速不畅,跳链等。 DW-Link的特殊结构使得后下叉长度对变速产生的影响减小。使骑行过程变的更为平顺。
均衡的制动力
从DW-Link系统投射出它的立时支点在最佳位置。在巨大刹车力时,实现后轮的平衡和稳定的路面循迹力。在刹车的同时,后避震可以完全发挥作用,并完全吸收刹车产生的动能,保持平衡。
渐进呈线性的避震行程速率
DW-Link系统是专为车轮避震行程速率和与特定调较的后避震器弹簧率和阻尼器配合而设计的。不像其他的悬挂系统, 且不依赖于避震的踩踏平台。_
换而言之,DW-LINK的结构可以达到良好的吸震和路面循迹力,而不需要避震本身是否具有踩踏平台。
进阶的骑手更可使用这些特性打泵(pump tracking)的形式在起伏山路取得惯性加速的优势。类似于在一段搓板路上进行持续的加速,后避震根据DW-LINK结构的特性可以将路面的势能转化为动能,获得更高的惯性。
